
精密機械加工,ベータチタンパイプの
ふたく
二九精密機械工業 株式会社
HOME » FUTA・Qメルマガ » 自社開発の紹介 » vol.32 「けいはんな研究室」のご紹介
vol.32 「けいはんな研究室」のご紹介
vol.32 「けいはんな研究室」のご紹介
更新日:
2021年4月1日に「けいはんな研究室」を開設しました。「けいはんなオープンイノベーションセンター(KICK)」の中にあり、約39 ㎡のスペースです。静かな環境で、パイプ内面非破壊自動検査などの研究開発を行っています。今号は、その研究内容の一部を紹介します。


■ 「けいはんな研究室」の研究開発テーマ
現在「けいはんな研究室」では、安心して使用いただける高品質な小径パイプ製品の提供をサポートするための技術として、①パイプ内面粗さ測定の高速化や自動化技術 ②パイプ内面の洗浄技術 ③パイプ製品の自動ハンドリング技術 ④パイプ製品の識別技術 ⑤パイプ内異物をAI判定により自動判別する技術、 ⑥これらの技術や装置を統合・システム化・IoT化するための技術などの研究開発を進めています。今回は、その中から以下の2つを紹介いたします。
【 小径パイプの自動ハンドリング技術の開発 】
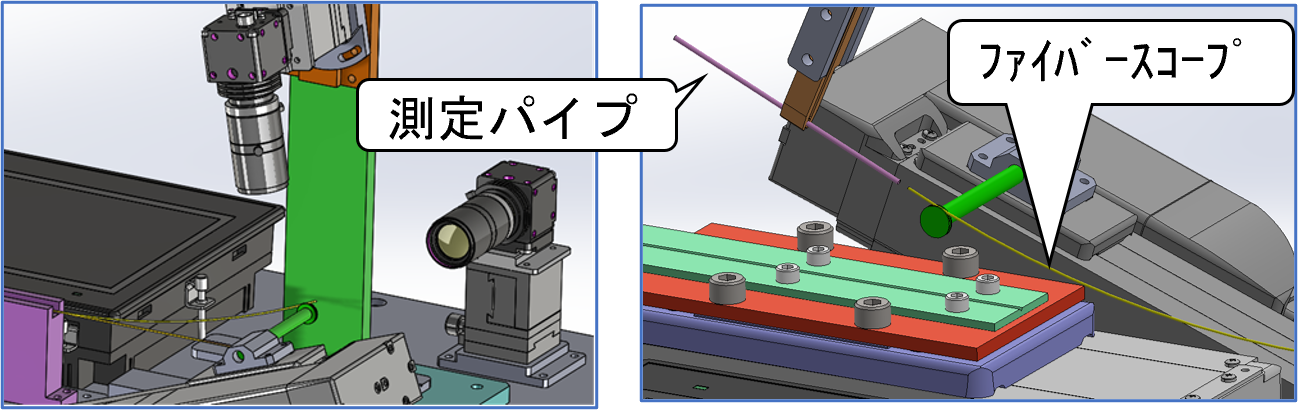
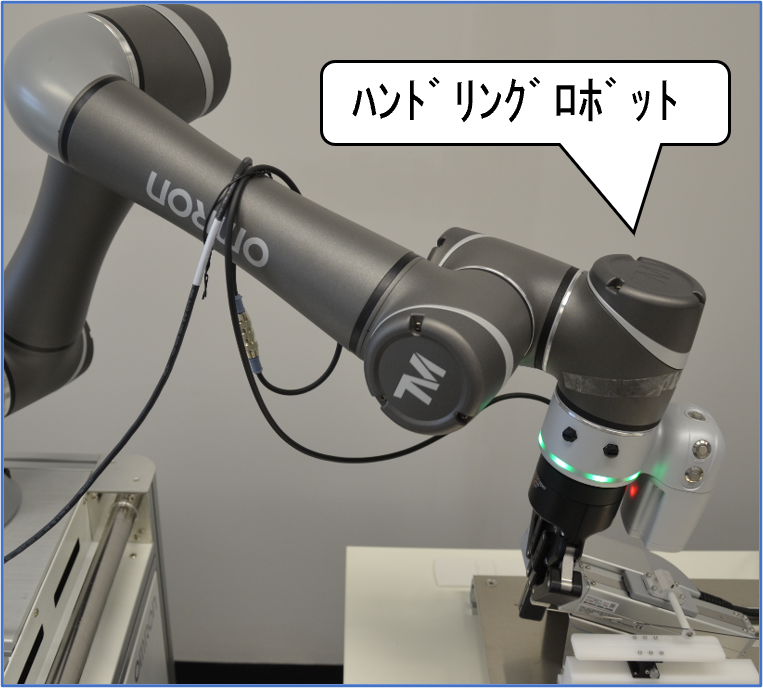
ハンドリングロボットを使用した小径パイプ内へのファイバースコープ挿入など全自動システムの開発を進めています。複数のカメラを使用して位置制御を行っています。
【 小径パイプのID(2次元コード)認識技術の開発 】
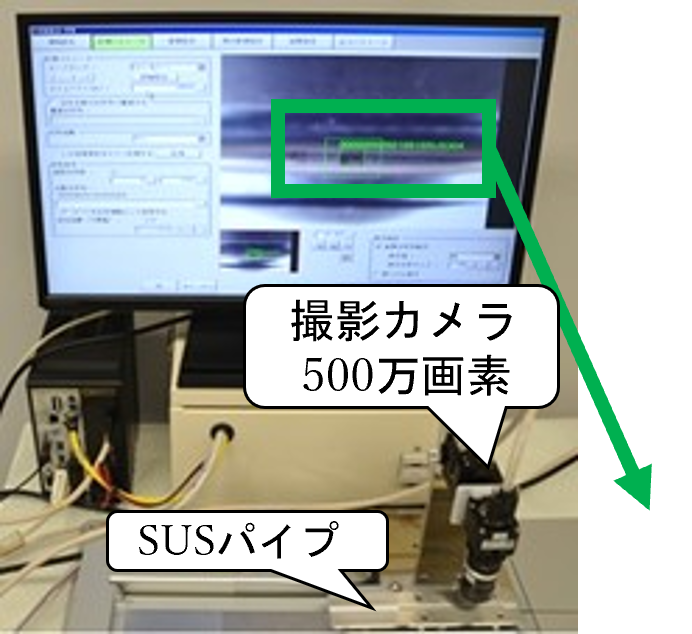
トレーサビリティを実現するためには、小径パイプを識別管理する技術が大切です。2次元コードを用いてSUS小径パイプへのマーキングや読み取り性を検討しています。長方形データマトリクスを用いることで、外径Φ1.61 mmのパイプで読み取りできることを確認しました。

正方形1.08×1.08 mm(認識可)
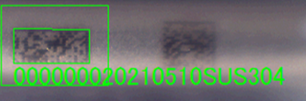
長方形0.72×1.56 mm(認識可)
☆ 加工部品そのものに2次元コードをマーキングすることで重要部品の履歴管理や定期交換、修理など、装置メンテナンスに役立つかも知れません。お気軽にご相談をお待ちしております。
